Vertical hopper compositions for preflexive and feedback stabilized quadrupedal bounding, pacing, pr IJRR Multimedia 1,23 тыс. подписчиков Скачать
Vertical hopper compositions for preflexive and feedback stabilized quadrupedal bounding, pacing, pr Скачать
An Emergent Group Mind Across A Swarm of Robots Collective Cognition and Distributed Sensing via a S Скачать
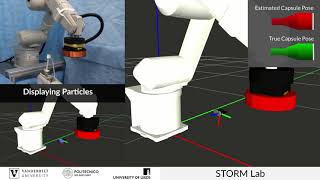
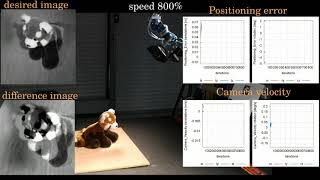
Part 1 Enhanced Real Time Pose Estimation for Closed Loop Robotic Manipulation of Magnetically Скачать
Part 2 Enhanced Real Time Pose Estimation for Closed Loop Robotic Manipulation of Magnetically Actua Скачать
Part 5 Enhanced Real Time Pose Estimation for Closed Loop Robotic Manipulation of Magnetically Actua Скачать
Part 3 Enhanced Real Time Pose Estimation for Closed Loop Robotic Manipulation of Magnetically Actua Скачать
Part 4 Enhanced Real Time Pose Estimation for Closed Loop Robotic Manipulation of Magnetically Actua Скачать
Efficient Grounding of Abstract Spatial Concepts for Natural Language Interaction with Robot Platfor Скачать
Feedback Synthesis For Underactuated Systems Using Sequential Second Order Needle Variations part 2 Скачать
Feedback Synthesis For Underactuated Systems Using Sequential Second Order Needle Variations part 3 Скачать
Feedback Synthesis For Underactuated Systems Using Sequential Second Order Needle Variations part 1 Скачать
Feedback Synthesis For Underactuated Systems Using Sequential Second Order Needle Variations part 4 Скачать
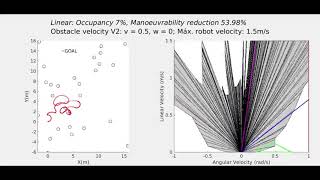
Probabilistic Cooperative Mobile Robot Area Coverage and its Application to Autonomous Seabed Mappin Скачать
Simultaneous Task Allocation and Planning for Temporal Logic Goals in Heterogeneous Multi Robot Syst Скачать
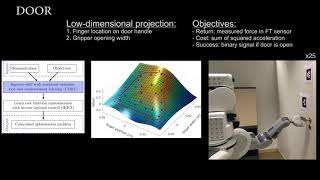
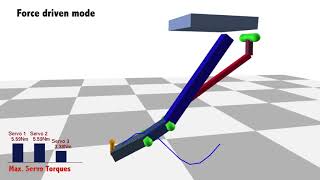
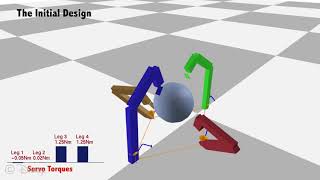
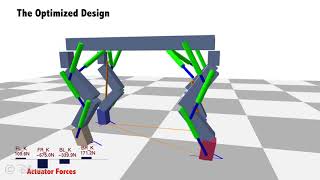
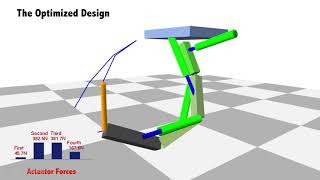
Computational Co Optimization of Design Parameters and Motion Trajectories for Robotic Systems 2 Скачать
Computational Co Optimization of Design Parameters and Motion Trajectories for Robotic Systems 4 IJR Скачать
Autonomous Flight and Cooperative Control for Reconstruction using Aerial Robots Powered by Smartph Скачать
Computational Co Optimization of Design Parameters and Motion Trajectories for Robotic Systems 5 IJR Скачать
Computational Co Optimization of Design Parameters and Motion Trajectories for Robotic Systems 3 IJR Скачать
Computational Co Optimization of Design Parameters and Motion Trajectories for Robotic Systems 1 Скачать
Humanoid Gait Generation in Complex Environments Based on Optimality Principles Learned from Humans Скачать
Perching with a Robotic Insect using Adaptive Tracking Control and Iterative Learning Control IJR Скачать
Underwater navigation based on passive electric sense: new perspectives for underwater docking Скачать
Design, development, and evaluation of an MRI-guided SMA spring-actuated neurosurgical robot (2) Скачать
Design, development, and evaluation of an MRI-guided SMA spring-actuated neurosurgical robot (1) Скачать
Dynamics-based motion de-blurring for a PZT-driven, compliant camera orientation mechanism (2) Скачать
Dynamics-based motion de-blurring for a PZT-driven, compliant camera orientation mechanism (1) Скачать
A Gestaltist approach to contour-based object recognition: Combining bottom-up and top-down cues Скачать
Low-bandwidth reflex-based control for lower power walking: 65 km on a single battery charge (2) Скачать
High-speed videos of centimeter-scale SoftCube prototype self-assembling the original 3D shape. Скачать
Indirect pushing based automated micromanipulation of biological cells using optical tweezers Скачать
Incremental controller synthesis in probabilistic environments with temporal logic constraints Скачать
Dynamic walking and whole-body motion planning for humanoid robots: an integrated approach (3 of 4) Скачать
Dynamic walking and whole-body motion planning for humanoid robots: an integrated approach (2 of 4) Скачать
Dynamic walking and whole-body motion planning for humanoid robots: an integrated approach (1 of 4) Скачать
The Velo Gripper: A Versatile Single-actuator Design for Enveloping, Parallel and Fingertip Grasps Скачать
A New Hybrid Actuation Scheme with Artificial Pneumatic Muscles and a Magnetic Particle Brake... Скачать
Distributed Assembly with Online Workload Balancing and Visual Error Detection and Correction Скачать
Planning for Provably Reliable Navigation using an Unreliable, Nearly Sensorless Robot (4 of 5) Скачать
Planning for Provably Reliable Navigation using an Unreliable, Nearly Sensorless Robot (5 of 5) Скачать
Planning for Provably Reliable Navigation using an Unreliable, Nearly Sensorless Robot (3 of 5) Скачать
Planning for Provably Reliable Navigation using an Unreliable, Nearly Sensorless Robot (2 of 5) Скачать
Planning for Provably Reliable Navigation using an Unreliable, Nearly Sensorless Robot (1 of 5) Скачать