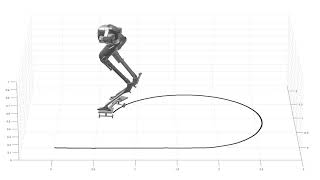
Reinforcement Learning for Versatile, Dynamic, and Robust Bipedal Locomotion Control Hybrid Robotics 1,71 тыс. подписчиков Скачать
Supplementary Running Experiments - RL for Versatile, Dynamic, and Robust Bipedal Locomotion Control Скачать
Supplementary Walking Experiments - RL for Versatile, Dynamic, and Robust Bipedal Locomotion Control Скачать
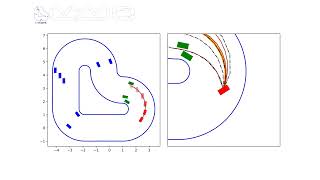
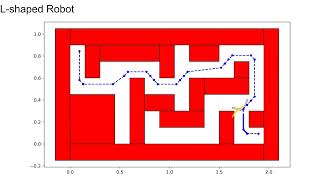
Duality-based Convex Optimization for Real-time Obstacle Avoidance between Polytopes with CBFs Скачать
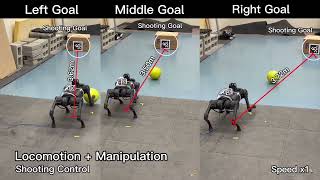
Hierarchical Reinforcement Learning for Precise Soccer Shooting Skills using a Quadrupedal Robot Скачать
Collaborative Navigation and Manipulation of a Cable-towed Load by Multiple Quadrupedal Robots Скачать
Bayesian Optimization Meets Hybrid Zero Dynamics: Safe Parameter Learning for Bipedal Locomotion Скачать
Safety-Critical Control for Obstacle Avoidance between Polytopes with Control Barrier Functions Скачать
Gaussian Process-based Min-norm Stabilizing Controller for Control-Affine Systems with Uncertainty Скачать
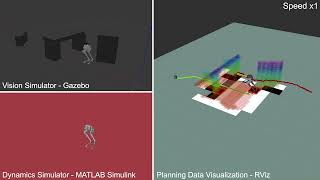
Autonomous Navigation for Quadrupedal Robots with Optimized Jumping through Constrained Obstacles Скачать
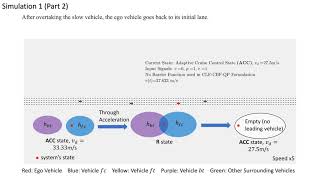
Rule-Based Safety-Critical Control Design using CBFs with Application to Autonomous Lane Change Скачать
Differential Flatness based Direct Collocation for a Quadrotor with a Cable-Suspended Payload Скачать
Legged Robot State Estimation in Slippery Environments Using Invariant EKF with Velocity Update Скачать