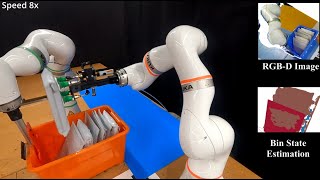
Automated Contingency Handling Framework for Factories of the Future CAM USC Viterbi 944 подписчика Скачать
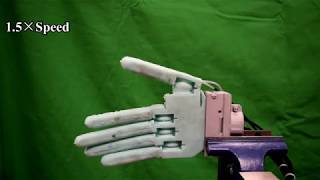
Learning Tool Manipulation from Multi-Modal Human Demonstration Data for Granular Material Transfer Скачать
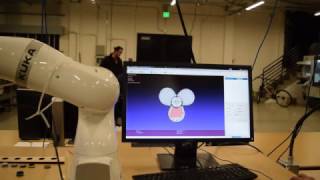
Enhancing Human Productivity on Assembly Tasks with a Smart Robotic Assistant Developed by USC CAM Скачать
Using an Articulated Industrial Robot to Perform Conformal Deposition with Mesoscale Features Скачать
Towards Time-Optimal Trajectory Planning for Pick-and-Transport Operation with a Mobile Manipulator Скачать