Last Samurai - Idyll's End by Hans Zimmer (Piano cover by Kaustav Mondal) Kaustav Mondal 36 подписчиков Скачать
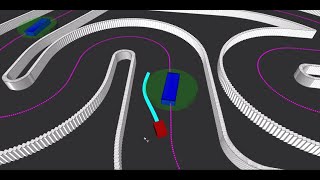
Maximum progress maneuvering around racetrack with obstacles via nonlinear model predictive control. Скачать
Dynamic formation reconfiguration of mobile robots using centralized model predictive control Скачать
Single robot trajectory tracking via model predictive control (MPC) in presence of static obstacles Скачать
Convoy control of mobile robots in presence of obstacle via centralized model predictive control Скачать
Vehicle Detection using Histogram of Oriented Gradients feature extraction and Linear SVM Classifier Скачать
2D grid based path planning using potential field methods: Single and multirobot coordination Скачать
Motion Planning in Dynamic Environment using Spline Interpolation and Model Predictive Control Скачать
Trajectory tracking and obstacle avoidance of nonholonomic robot using model predictive control Скачать