Label-Free Adaptive Gaussian Sample Consensus for Learning from Perfect and Imperfect Demonstrations Mahdi Tavakoli 262 подписчика Скачать
Label-Free Adaptive Gaussian Sample Consensus for Learning from Perfect and Imperfect Demonstrations Скачать
Augmented Reality-Based Tumor Localization and Visualization for Robot-Assisted Breast Surgeries Скачать
EMG-Based Intention Detection Using Deep Learning For Shared Control In Upper-Limb Exoskeletons Скачать
A Realistic Surgical Simulator for Non-Rigid and Contact-Rich Manipulation in Surgeries with dVRK Скачать
EMG-Based Intention Detection Using Deep Learning for Shared Control in Assistive Exoskeletons Скачать
Robot Learning Incorporating Human Interventions for Autonomous Surgical Endoscopic Camera Control Скачать
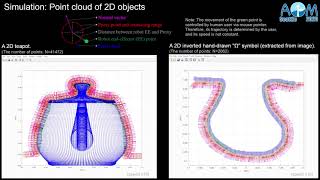
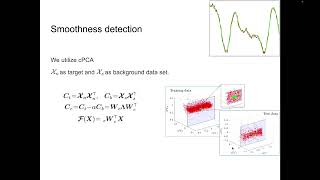
Point-Based 3D Virtual Fixture Generating for Image-Guided and Robot-Assisted Surgery in Orthopedics Скачать
Point-Based 3D Virtual Fixture Generating for Image-Guided and Robot-Assisted Surgery in Orthopedics Скачать
Registration of Deformed Tissue: A GNN-VAE Approach with Data Assimilation for Sim-to-Real Transfer Скачать
Deep Reinforcement Learning based Personalized Locomotion Planning for Lower-Limb Exoskeletons Скачать
Point-Based 3D Virtual Fixture Generation for Image-Guided/Robot-Assisted Surgery in Orthopedics Скачать
Intelligent assistance for older adults: A wheeled manipulator with task-dependent end-effectors Скачать
Admittance Control of Multi-DOF Manipulators Considering Joint Flexibility via Hierarchical Control Скачать
Dual-User Haptic Teleoperation of a Redundant Wheeled Mobile Manipulator Considering Task Priority Скачать
Human-Robot Collaboration for Object Manipulation: Kinesthetic Teaching of Wheeled Manipulator Скачать
Human-Robot Collaboration for Heavy Object Manipulation: Kinesthetic Teaching of Wheeled Manipulator Скачать
Adaptive CPG-based Gait Planning with Torque Estimation and Control for Lower-limb Exoskeletons Скачать
Enhancing kinematic accuracy of redundant wheeled mobile manipulators via adaptive motion planning Скачать
Improving a User's Haptic Perceptual Sensitivity by Optimizing Manipulability of a Redundant UI Скачать
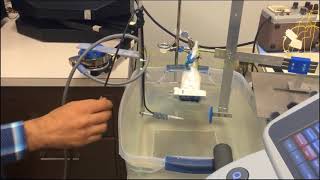
A Low-cost Intrinsically Safe Mechanism for Physical Distancing (5 minutes - 2021 ASI Symposium) Скачать
Delay-Robust Nonlinear Control Of Bounded-Input Telerobotic Systems With Synchronization Enhancement Скачать
A Low-cost Intrinsically Safe Mechanism for Physical Distancing Between Clinicians and Patients Скачать
A Low-cost Intrinsically Safe Mechanism for Physical Distancing Between Clinicians and Patients Скачать
Enhancement of Force Exertion Capability of a Mobile Manipulator by Kinematic Reconfiguration Скачать
Redundant Haptic Interfaces for Enhanced Force Feedback Capability Despite Joint Torque Limits Скачать
Demonstration-Based Learning and Robotic Imitation of Therapist’s Haptic Negotiation with Patient Скачать
Robots help injured workers recover via remote physiotherapy (CBC Edmonton 11:00 pm, June 18, 2020) Скачать
Assist-as-needed Policy for Movement Therapy Using Telerobotics-mediated Therapist Supervision Скачать
Visual-Haptic Colocation in Robotic Rehabilitation Exercises Using a 2D Augmented-Reality Display Скачать
Improving User Performance in Haptics-Based Rehabilitation via a 3D Augmented-Reality Display Скачать
Stable Nonlinear Trilateral Impedance Control for Delayed Dual-User Haptic Teleoperation Systems Скачать
Impedance Control of Nonlinear Multi-DOF Teleoperation Systems with Time Delay: Absolute Stability Скачать
Cooperative Modalities in Robotic Tele-Rehabilitation Using Nonlinear Bilateral Impedance Control Скачать
Robot Control for Beating-heart Surgery Under Delayed and Slowly-sampled Ultrasound Image Data Скачать
A Mechanics-based Model for Simulation and Control of Flexible Needle Steering in Soft Tissue Скачать