TraKDis: A Transformer-based Knowledge Distillation Approach for Visual Reinforcement Learning Imperial REDS Lab 798 подписчиков Скачать
TraKDis: A Transformer-based Knowledge Distillation Approach for Visual Reinforcement Learning Скачать
G.O.G: A Versatile Gripper-On-Gripper Design for Bimanual Cloth Manipulation with a Single Robot Arm Скачать
Synthetic data enables faster annotation and robust segmentation for multiobject grasping in clutter Скачать
Learning to grasp clothing structural regions for garment manipulation - IROS 2023 presentation Скачать
The Hydra Hand: A Mode-Switching Underactuated Gripper with Precision and Power Grasping Modes Скачать
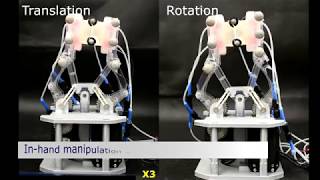
Mechanical Intelligence for In-Hand Manipulation of Spatial Trajectories - ICRA 2023 presentation Скачать
Mechanical Intelligence for Prehensile In-Hand Manipulation of Spatial Trajectories - ICRA 2023 Скачать
A Balanced Delta Robot for Aerial Manipulation: Design and Future Lessons - IROS 2022 presentation Скачать
EfficientGrasp: A Unified Data-Efficient Learning to Grasp Method for Multi-fingered Robot Hands Скачать
A Balanced Delta Robot for Precise Aerial Manipulation: Design and Future Lessons - IROS 2022 Скачать
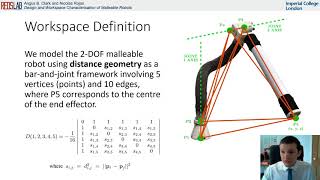
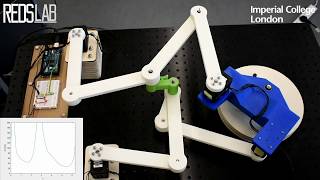
Malleable Robots: Reconfigurable Robotic Arms with Continuum Links of Variable Stiffness - T-RO 2022 Скачать
VR Pre-Prosthetic Hand Training w/ Physics Simulation and Force Interaction - ICRA 2022 presentation Скачать
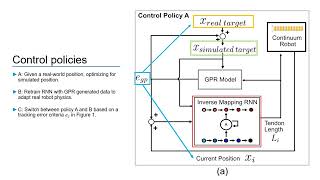
A Data-Efficient Learning Framework for the Control of Continuum Robots - RoboSoft 2022 presentation Скачать
A Data-Efficient Model-Based Learning Framework for the Control of Continuum Robots - RoboSoft 2022 Скачать
VR Pre-Prosthetic Hand Training with Physics Simulation and Force Interaction - RA-L-ICRA 2022 Скачать
An Underactuated Gripper for Self-Adaptive Grasping with Passive Disturbance Rejection - ICRA 2021 Скачать
A Passively Complaint Idler for Grippers with Dynamic Tendon Routing - TAROS 2020 presentation Скачать
A Variable Stiffness Joint based on Layer Jamming for Robotic Exoskeletons - TAROS 2020 presentation Скачать
In-Hand Manipulation of Soft Objects using Soft Fingertips with Tactile Sensing - RoboSoft 2020 Скачать
Soft Fingertips with Tactile Sensing and Active Deformation for Robust Grasping - RA-L-ICRA 2020 Скачать
Assessing the performance of variable stiffness structures of large diameter - RA-L-RoboSoft 2019 Скачать
Enhancing in-hand manipulation via mechanical intelligence (Guest Lecture, ShanghAI Lectures 2017) Скачать