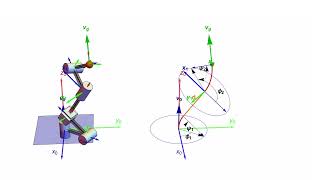
Min-Time Planar Paths with L2 Velocity & Acceleration Constraints, Limited # Constant Acc. Inputs Aaron Becker 4,53 тыс. подписчиков Скачать
Min-Time Planar Paths with L2 Velocity & Acceleration Constraints, Limited # Constant Acc. Inputs Скачать
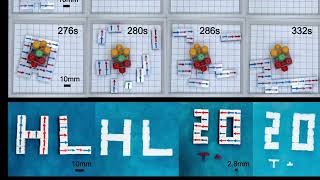
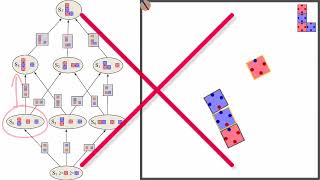
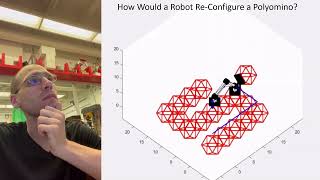
Reconfiguration of a 2D Structure Using Spatio-Temporal Planning and Load Transferring [ICRA 2024] Скачать
Insertion, Retrieval & Performance of Miniature Magnetic Rotating Swimmers for Thrombi Treatment Скачать
Simulation of 4 magnetically-steered ciliate protozoa steered to independent desired positions Скачать
Planar Multi-Robot Manipulation when each robot receives exactly the same control inputs--Pushing Скачать
Ensemble control of spheres: open loop controller to reorient spheres of unknown diameter 2.0 Скачать
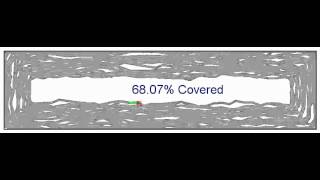
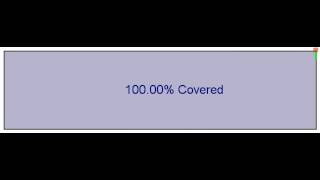
Robotic Coverage: Comparing Back-and-Forth Paths with Random-Reflection with Different GPS Sensors Скачать
Ensemble Control: one set of primitives can be scaled to move ensemble anywhere in Cartesian plane Скачать


![Reconfiguration of a 2D Structure Using Spatio-Temporal Planning and Load Transferring [ICRA 2024]](http://i.ytimg.com/vi/aatbQ9FGW0A/mqdefault.jpg)






![Congratulations Class of 2020! [Big fish released from a little pond]](http://i.ytimg.com/vi/wXwMJRa4Hxo/mqdefault.jpg)






















































































































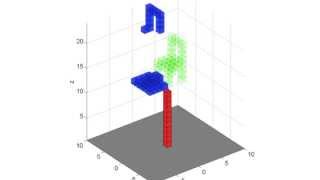















































![Reconfiguration of a 2D Structure Using Spatio-Temporal Planning and Load Transferring [ICRA 2024]](https://img.save4k.ru/pic/aatbQ9FGW0A/mqdefault.jpg)












![Congratulations Class of 2020! [Big fish released from a little pond]](https://img.save4k.ru/pic/wXwMJRa4Hxo/mqdefault.jpg)





















































































































































































