Model-based reinforcement learning approach for deformable linear object manipulation, IEEE CASE2017 Скачать
Leveraging Demonstrator-Perceived Precision for Safe Interactive IL of Clearance-Limited Tasks Скачать
Disturbance Injection under Partial Automation: Robust Imitation Learning for Long-horizon Tasks Скачать
Deep reinforcement learning of event-triggered communication and consensus-based control for distri~ Скачать
Bayesian Disturbance Injection:Robust Imitation Learning of Flexible Policies for Robot Manipulation Скачать
Goal-Aware Generative Adversarial Imitation Learning applied to real robotic cloth-manipulation task Скачать
Deep reinforcement learning with smooth policy update: Application to robotic cloth manipulation Скачать
Exploiting Human and Robot Muscle Synergies for Human-in-the-loop Optimization of EMG-based Assist Скачать
Sample-and-computational-efficient Probabilistic Model Predictive Control with Random Features Скачать
Full-body Exoskeleton Robot Control for Walking Assistance by Style-phase Adaptive Pattern Generatio Скачать
Kernel dynamic policy programming: Practical reinforcement learning for high-dimensional robots. Скачать
Learning Food-arrangement Policies from Raw Images with Generative Adversarial Imitation Learning Скачать
Environment-adaptive interaction primitives through visual context for human---robot motor skill lea Скачать
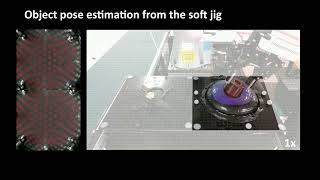
Exploiting Visual-outer Shape for Tactile-inner Shape Estimation of Objects Covered with Soft Materi Скачать
Reinforcement Learning Boat Autopilot: A Sample-efficient and Model Predictive Control-based Approac Скачать