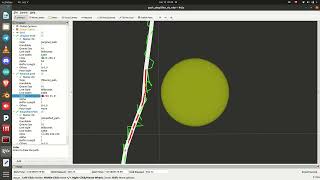
Filtering Path Plan using Kalman Filter and simplify it to N Points ROS Billy Nugraha Sutandi 42 подписчика Скачать
Oped Quadruped Dynamixel AX-12 #5 - Autonomous Navigation RPLidar A1M8 (CHAMP Robot Controller ROS) Скачать
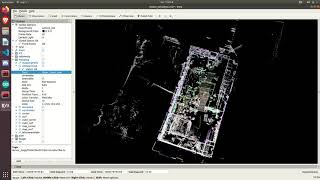
Oped Quadruped Dynamixel AX-12 #4 - SLAM Navigation RPLidar A1M8 (CHAMP Robot Controller ROS) Скачать
Oped Quadruped Dynamixel AX-12 #3 - SLAM Gmapping RPLidar A1M8 (CHAMP Robot Controller ROS Package) Скачать
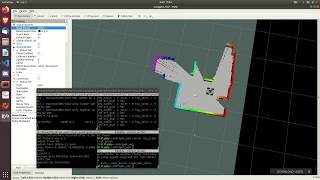
Oped Quadruped Dynamixel AX-12 #2 - X Orientation (CHAMP Robot Controller ROS Package) Holonomic Скачать
Oped Quadruped Dynamixel AX-12 - Testing #1 (using CHAMP Quadruped Robot Controller ROS Package) Скачать


![URDF models of Type-A and Type-C ROBOTIS Humanoid BIOLOID Premium Robot on ROS [Package]](http://i.ytimg.com/vi/iGAEiprvO6g/mqdefault.jpg)








![URDF models of Type-A and Type-C ROBOTIS Humanoid BIOLOID Premium Robot on ROS [Package]](https://i.ytimg.com/vi/iGAEiprvO6g/mqdefault.jpg)







