Optimized Invariance Conditions for Uncertain Input-Constrained Nonlinear Systems (Presentation) Learning Systems and Robotics Lab 1,32 тыс. подписчиков Скачать
Optimized Invariance Conditions for Uncertain Input-Constrained Nonlinear Systems (Presentation) Скачать
ACC24: Is Data All that Matters? The Role of Control Frequency for Uncertain Systems (Presentation) Скачать
ICRA'24 Control-Barrier-Aided Teleoperation with VI-SLAM for Safe MAV Navigation (Presentation) Скачать
ACC24: Practical Considerations for Implementing Control Barrier Function-Based Safety Filters Скачать
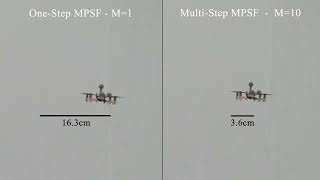
Optimized Control Invariance Conditions for Uncertain Input-Constrained Nonlinear Control Systems Скачать
LSY Invited Talks: Kimberly McGuire "Swarming with the Lighthouse Positioning System and ROS2" Скачать
Finding the Right Place: Sensor Placement for UWB TDOA Localization in Cluttered Indoor Environments Скачать
SiQi Zhou Doctoral Seminar: Neural Networks as Add-on Modules for Improving Robot Performance Скачать
Panel on Realistic Simulation Tools: Karime Pereida, Liila Torabi, Erwin Coumans, and Joelle Pineau Скачать
CDC21: RLO-MPC: Robust Learning-Based Output Feedback MPC for Uncertain Systems in Iterative Tasks Скачать
Learning to Fly—a Gym Environment with PyBullet Physics for RL of Multi-agent Quadcopter Control Скачать
ICRA21: Meta Learning With Paired Forward and Inverse Models for Efficient Receding Horizon Control Скачать
ICRA21: Learning-based Bias Correction for TDOA UWB Localization of Resource-constrained Robots Скачать
Do We Need to Compensate for Motion Distortion and Doppler Effects in Spinning Radar Navigation? Скачать
Exploiting Differential Flatness for Robust Learning-Based Tracking Control using Gaussian Processes Скачать
Learning-based Bias Correction for TDOA UWB Localization of Resource-constrained Mobile Robots Скачать
Catch the Ball: Accurate High-Speed Motions for Mobile Manipulators via Inverse Dynamics Learning Скачать
Catch the Ball: Accurate High-Speed Motions for Mobile Manipulators via Inverse Dynamics Learning Скачать
Doctoral Seminar: Adaptive and Learning Controllers for Trajectory Tracking in Changing Conditions Скачать
Visual Localization with Google Earth Images for Robust Global Pose Estimation of UAVs @ICRA2020 Скачать
Experience Selection Using Dynamics Similarity for Efficient Multi-Source Transfer Learning@ICRA2020 Скачать
Context-aware Cost Shaping to Reduce the Impact of Model Error in Receding Horizon Control@ICRA2020 Скачать
Provably Robust Learning-Based Approach for High-Accuracy Tracking Control of Lagrangian Systems Скачать
aUToTrack: A Lightweight Object Detection and Tracking System for the SAE AutoDrive Challenge Скачать