Computing curriculum/jobs in Mechanical & Industrial Engineering at University of Illinois Chicago Скачать
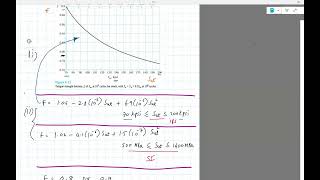
Design Lec18c: Endurance limit modifying factors, problem on Kd temperature factor (Spring 2024) Скачать
Design Lec16a: Failure Theory Brittle Materials (Max. Normal, Coulomb-Mohr, Mod. Mohr) (Spring 2024) Скачать
Design Lec13c: Problem on Max. Shear Stress (MSS) & Distortion Energy (DE) Theory (Spring 2024) Скачать
Data-driven Identification of Non-homogeneous Inverted Pendulum Model for Enhanced Humanoid Control Скачать
Robotics Lec 18d: Example 3, Denavit Hartenberg, 3R 3D manipulator / animations (4 of 4) (Fall 2023) Скачать
Robotics Lec 18a: Forward Kinematics of Manipulators, Denavit Hartenberg (1 of 4) (Fall 2023) Скачать
Numerics Lec09c: Multistep numerical integration, Adam-Bashforth and Adam-Moulton (Fall 2023) Скачать
Robotics Lec14b: Linear Control, Linearization of differential drive car and pendubot (Fall 2023) Скачать
Lec08a: Numerical Integration - Rectangular, Trapezoidal, Simpsons 1/3 and 3/8 th rule (Fall 2023) Скачать
Numerics Lec 07b: Newton Divided Difference / Newton-Gregory Forward/Backward Interpol. (Fall 2023) Скачать
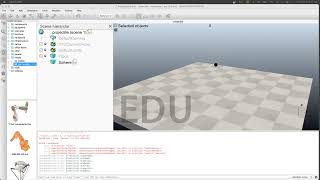
CoppeliaSim: Pendulum, Position/Velocity/Force Control and Transitioning Controllers (part 2 of 2) Скачать
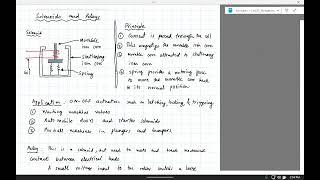
Mechatronics Lec23b: Ultrasonic/infrared, contact, potentiometer, LVDT, RFID sensors (Spring 2023) Скачать
Mechatronics Lec23a: Emitter/detector, Hall effect, Inductive/Eddy Current Sensor (Spring 2023) Скачать
A simple controller for omnidirectional trotting of quadrupeds: command following and tracking Скачать
Mechatronics Lec7: Light-emitting diode, photodiode, analyzing circuits with diode (Spring 2023) Скачать