Matt Johnson-Roberson - Merging Paths: The Shared History and Convergent Future of AI and Robotics Скачать
Kostas Alexis - Resilient Robotic Autonomy: Experiences from the DARPA Subterranean Challenge Скачать
ICRA 2022 Eiichi Yoshida - Humanoid and Digital Actor as Cyber-Physical Twins for Human Behaviors Скачать
ICRA 2022 Gavin Ananda - Detect and Avoid for National Scale Autonomous Instant Logistics Operations Скачать
ICRA 2022 Ayanna Howard - Robots, Ethics, and Society: Mitigating the Bias in Emerging Technologies Скачать
IEEE ROBIO 2021 Keynote Talk -- Kanako Harada: Interdisciplinary Robot Research and Its Management Скачать
ICRA 2021 Keynote Talk -- Weihong (Grace) Gao: Manufacturing Automation – Digital Thread of Metal .. Скачать
ICRA 2021 Keynote Talk - Maria Pia Fanti: Automation and Industry 4.0 Strategies for Logistic .. Скачать
ICRA 2021 Keynote Talk -- Kevin Chen: Agile and Robust Micro-Aerial-Robots Powered by Soft ... Скачать
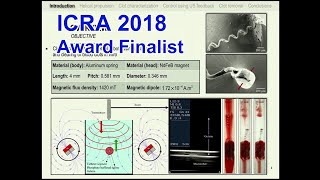
ICRA 2021 Keynote Talk -- Hongsoo Choi: A Magnetically Controlled Microrobot based on Guidewire ... Скачать
ICRA 2021 Plenary Talk -- Robert Wood : Soft Robotics for Delicate and Dexterous Manipulation Скачать
IROS 2020 Keynote -- I-Ming Chen: Automation of Food Handling: From Item-Picking to Food-Picking Скачать
IROS 2020 Keynote -- Ashish Deshpande: Harmony Exoskeleton: A Journey from Robotics Lab to Stroke.. Скачать
IROS 2020 Keynote -- Frank Dellaert: Perception in Aerial, Marine & Space Robotics: a Biased Outlook Скачать
IROS 2020 Plenary Talk -- Yukie Nagai : Cognitive Development in Humans and Robots: New Insights .. Скачать
ICRA 2020 Keynote Talk: Hajime Asama -- Robot Technology for Super Resilience – Remote Technology... Скачать
ICRA 2020 Keynote: Cyrill Stachniss -- Robots in the Fields: Directions Towards Sustainable Crop ... Скачать
ICRA 2020 Keynote Talk: Jaeheung Park -- Compliant Whole-body Control for Real-World Interactions Скачать
ICRA 2020 Keynote Talk: Pieter Abbeel -- Can Deep Reinforcement Learning from pixels be made as ef.. Скачать
ICRA 2020 Keynote : Kerstin Dautenhahn -- Human-Centred Social Robotics: Autonomy, Trust and Inte... Скачать
ICRA18 Finalist of Best Vision Paper: Online Photometric Calibration of Auto Exposure Video for Rea. Скачать
ICRA 2020 Plenary Talk: Jean-Paul Laumond -- Geometry of Robot Motion: from the Rolling Car to ... Скачать
“Morphological Contribution vs. Traditional Methods for Control and Planning in Soft Robotics” Скачать
ICRA18 Finalist of Best UAV Paper: Onboard Vision-based Control of Agile Suspended Payload Maneuvers Скачать
ICRA18 Finalist of Best UAV Paper: Control Inspired Design of a Fixed-Wing Unmanned Aerial-Aquatic.. Скачать
ICRA18 Finalist of Best UAV Paper: Towards a wind-powered UAV for ocean monitoring: performance, .. Скачать
ICRA18 Finalist of Best Paper in Service Robotics: Real-time Semantic Segmentation of Crop & Weed... Скачать
ICRA18 Finalist of Best Paper on Multi-Robot: Voronoi-Based Coverage Control of Pan/Tilt/Zoom Came.. Скачать
ICRA18 Finalist of Medical Robot Paper: Mechanical Rubbing of Blood Clots using Helical Robots ... Скачать
ICRA18 Finalist of Best Paper on HRI: Safety Map: A Unified Representation for Biomechanics Impact.. Скачать
ICRA18 Finalist of Best Paper on HRI: Scaling inertial forces to alter weight perception in vir .. Скачать
ICRA18 Finalist of Best Student Paper: A Modular Dielectric Elastomer Actuator to Drive Miniature.. Скачать
ICRA18 Finalist of Best Paper on Cognitive Robotics and Service Robotics:The Exchange of Knowledge.. Скачать
ICRA18 Finalist of Award Paper on Cognitive Robotics: Temporal Spatial Inverse Semantics for Robo.. Скачать
ICRA18 Finalist of Award Paper on Cognitive Robotics: Negotiating with a robot: Analysis of Regu .. Скачать
ICRA18 Finalist of Best Paper on Automation: A Novel Automated Construction Scheme for Efficiently.. Скачать
ICRA18 Best Paper in Robot Vision: Optimization Beyond the Convolution: Generalizing Spatial Rela... Скачать
ICRA18 Best Paper on UAV: Design, Modeling and Control of Aerial Robot DRAGON: Dual-rotor-embedded.. Скачать
ICRA18 Best Student Paper: Design of an Autonomous Racecar: Perception, State Estimation and Syst .. Скачать
ICRA18 Best Paper in Service Robotics: PRM-RL: Long-range Robotic Navigation Tasks by Combining Re.. Скачать
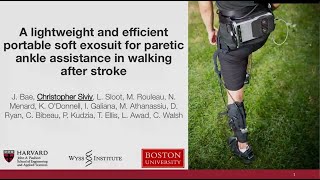
ICRA18 Best Paper in Medical Robotics: A lightweight and efficient portable soft exosuit for pare.. Скачать
ICRA18 Best Paper in Robot Manipulation: Decentralized Adaptive Control for Collaborative Manipu... Скачать
ICRA18 Best Paper on HRI: Interactively Picking Real-World Objects with Unconstrained Spoken Lang.. Скачать
ICRA18 Best Paper in Cognitive Robotics: Social Attention: Modeling Attention in Human Crowds Скачать
ICRA18 Best Paper in Automation: Accurate and Adaptive In situ Fabrication of an Undulated Wall.. Скачать
ICRA18 Best Conference Paper Award Presentation: Compact Design of a Hydraulic Driving Robot ... Скачать
ICRA18 Keynote: Human Motion Measurement and Analysis: from the Lab to the Clinic and the Home Скачать
ICRA18 Keynote: Machine Learning for Safe High-performance Control of Mobile Robots,Angela Schoellig Скачать
IROS TV 2019-STAR LAB at the University of Surrey Space Technology for Autonomous systems & Robotics Скачать
IROS TV 2019- Pohang University of Science and Technology- Haptics and Virtual Reality Laboratory Скачать
IROS TV 2019- Maryland Robotics Center, Institute for Systems Research, University of Maryland Скачать
IROS TV 2019- Khalifa University Robotics Institute- Khalifa University of Science & Technology Скачать
IROS TV 2019- How to Build a Robot: Vision Based Estimation of Driving Energy for Planetary Rovers Скачать
IROS TV 2019- Cutting Edge Forum:Autonomous Driving,Contributions from Intelligent Robotics,AI & ITS Скачать
IROS TV 2019-Collaborative Robotics & Intelligent Systems Institute CoRIS at Oregon State University Скачать
ICRA-X 2018 Nancy Amato -- Artificial Intelligence for Planning Movements: From Robots to Proteins Скачать
IROS 2014 - Alin Albu Schaeffer - Robots for Interaction with Humans and Unknown Environments Скачать
Dawn Tilbury- Improving the performance of teleoperated ground robots with communication delays Скачать