Torque Controlled Locomotion of a Biped Robot with Link Flexibility LAAS GEPETTO 409 подписчиков Скачать
Passive Inverse Dynamics Control using a Global Energy Tank for Torque Controlled Humanoid Robots in Скачать
Whole Body Model Predictive Control with a Memory of Motion Experiments on a Torque-Controlled Talos Скачать
Performing tasks with a mobile manipulator: from motion planning to sensor based motion control Скачать
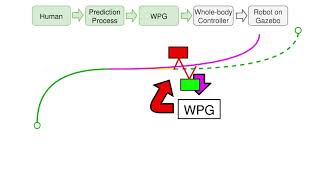
Human Trajectory Prediction Model and its Coupling with a Walking Pattern Generator for TALOS (v2) Скачать
Whole Body Model Predictive Control with a Memory of Motion-Experiments on a Torque-Controlled Talos Скачать
Human Trajectory Prediction Model and its Coupling with a Walking Pattern Generator for TALOS Скачать
Actuator model, Identification and Differential Dynamic Programming for a TALOS humanoid robot Скачать
Denis Vidal: What is an 'artificial person'? An anthropological perspective on humanoid robots Скачать
Salvatore Di Piazza: The stochastic intelligence. A rhetorical model from ancient Greece to robotics Скачать
Raphael Dumas - Multi body optimisation from kinematic constraints to knee contact and ligament Скачать
Tamar Flash - Motor compositionality and timing combined geometrical and optimization approaches Скачать
Ludovic Righetti - Model-based and data-driven approaches for the control of contact interactions Скачать
Estimation of Contact Forces and Floating Base Kinematics of a Humanoid Robot Using Only IMUs Скачать
Humanoid Flexibility Deformation Estimation and Stabilization Using Only Inertial Measurement Units Скачать