Blog: [ Ссылка ]
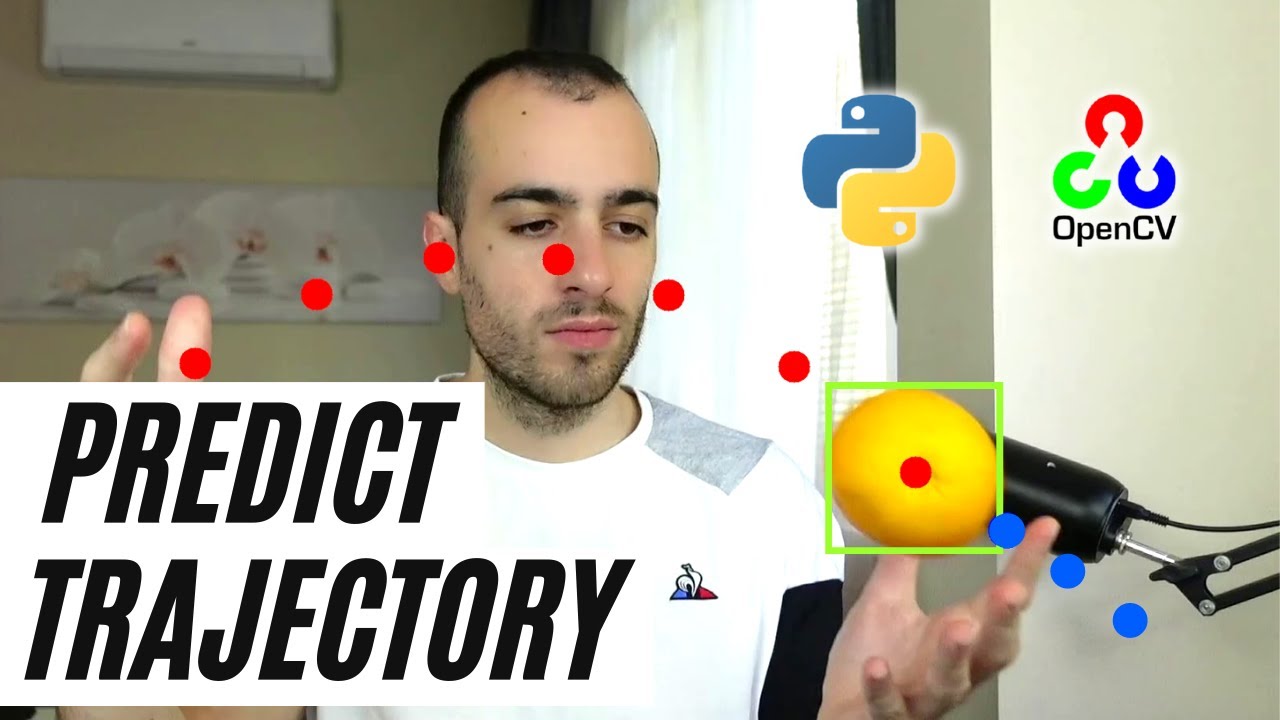
In this video, you will learn how you can predict the trajectory of an orange.
How did this algorithm work?
I threw an orange in the air by drawing a parable. The algorithm was able to predict the trajectory in real-time. I'll explain everything in the tutorial
➤ Courses:
Full Computer Vision course: [ Ссылка ]
Training Mask R-CNN PRO (Notebook + Mini-Course): [ Ссылка ]
➤ Follow me on:
LinkedIn: [ Ссылка ]
➤ For business inquiries:
[ Ссылка ]
#kalmanfilter #OpenCV #computervision