Новая распиновка [ Ссылка ]
[ Ссылка ]
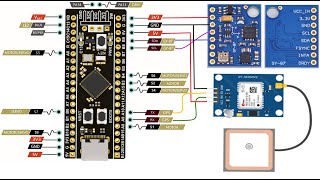
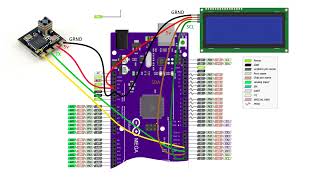
Сборка полётного контроллера на чипе stm32f411ceu6 из готовых модулей.
Внимание!!! Читай описание и закреплённый комментарий!!!
MPU6050, mpu6500, BMI160 и PPM на inav 5.1 работают!
Схема для BMI160 на github и в архиве с прошивкой.
Возможно работают и MPU6000 MPU9250 (подключение у всех акселерометров такое же как у mpu6500).
Файлы тут:
По запросу
github.com/p-fpv
Вк в шапке канала
Могу порекомендовать изменить gyro_hardware_lpf на 42, если нет хорошей виброразвязки.
Для mpu6050:
Не менять скорость i2c, работает только с 800khz, но другие датчики могут не работать на такой скорости (bmp280, hmc5883 у меня работали).
Протокол dshot сильно нагружает проц.
Если не выбирать keep current settings, то в cli ввести:
set looptime = 1500
set dshot_beeper_enabled = off
Не забываем устанавливать подходящий конфигуратор к нужной прошивке.
После прошивки на betaflight или Inav, режим DFU можно включить через командную строку(cli), команды:
Для inav: dfu
Для betaflight: bl
У меня клон платы от weact на чипе stm32f411ceu6
[ Ссылка ]
[ Ссылка ]
Полётник на stm32:
Часть 2.5: [ Ссылка ]
Часть 2: [ Ссылка ]
Часть 1: [ Ссылка ]
Полётник на ардуино:
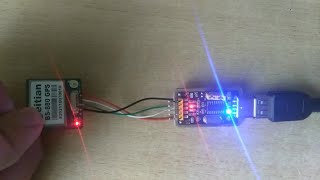
Часть 4: gps [ Ссылка ] (тест полёт [ Ссылка ] )
Часть 3: ставлю на квадрокоптер [ Ссылка ]
Часть 2: ставлю на крыло [ Ссылка ]
Часть 1: паяю полётник на ардуино [ Ссылка ]
Таймкоды:
0:00 Вступление
0:18 Прошивка и драйвера
1:05 Схемы
1:51 target



























































![Ты мне доверяешь, родной? | MEOW - 13 серия [4K]](https://s2.save4k.ru/pic/na7KnyXuqVs/mqdefault.jpg)
![Пару минут и тебя накроет! | MEOW - 2 серия [4K]](https://s2.save4k.ru/pic/pNBJ8gGhX88/mqdefault.jpg)