* Status: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2021 accepted.
* Category: Robotics and Automation in Construction, Hydraulic excavator, Motion Planning, Trajectory Optimization, Model Predictive Control
* Authors: Dongjae Lee*, Inkyu Jang*, Jeonghyun Byun, Hoseong Seo, and H. Jin Kim
* Abstract:
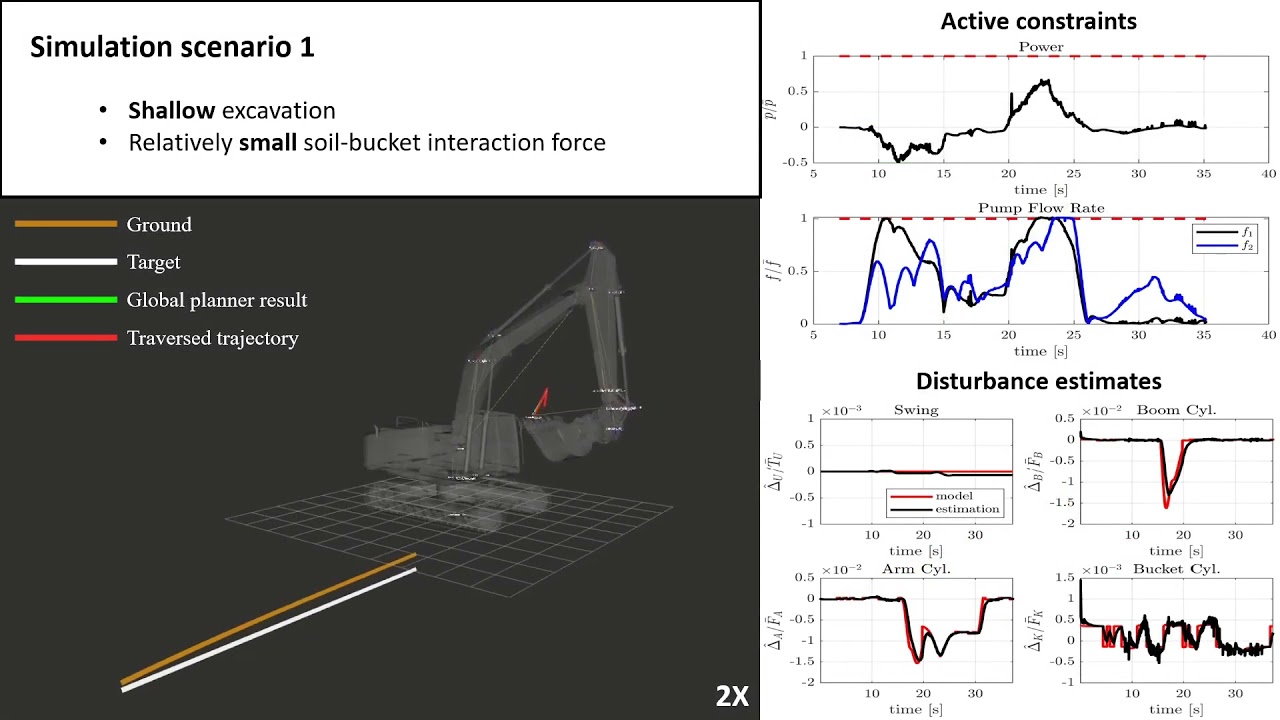
Automation of excavation tasks requires real-time trajectory planning satisfying various constraints. To guarantee both constraint feasibility and real-time trajectory re-plannability, we present an integrated framework for real-time optimization-based trajectory planning of a hydraulic excavator. The proposed framework is composed of two main modules: a global planner and a real-time local planner. The global planner computes the entire global trajectory considering excavation volume and energy minimization while the local counterpart tracks the global trajectory in a receding horizon manner, satisfying dynamic feasibility, physical constraints, and disturbance-awareness. We validate the proposed planning algorithm in a simulation environment where two types of operations are conducted in the presence of emulated disturbance from hydraulic friction and soil-bucket interaction: shallow and deep excavation. The optimized global trajectories are obtained in an order of a second, which is tracked by the local planner at faster than 30 Hz. To the best of our knowledge, this work presents the first real-time motion planning framework that satisfies constraints of a hydraulic excavator, such as force/torque, power, cylinder displacement, and flow rate limits.
* Contact: {ehdwo713, leplusbon}@snu.ac.kr