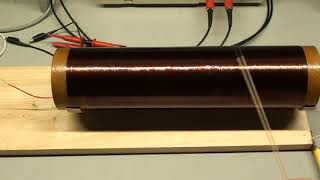
An individual with paraplegia due to spinal cord injury (SCI) uses electroencephalogram (EEG)-based brain-computer interface (BCI) to operate a robotic gait orthosis (Lokomat, Hocoma, Volketswil, Switzerland). The subject is instructed by alternating 1-minute cues presented on the screen to idle (red) and walk (green) for a total of 5 minutes. The subject is 80% body-weight supported. There is a 5-7 second delay due to Lokomat's start-up and shut-down cycle. The video also shows the mounting and unmounting procedures. Note the 4x speed.
This work--a collaboration between UC Irvine and Long Beach VA--is partially supported by the National Science Foundation, UC Irvine Institute for Clinical and Translational Sciences, VA SCIRE, and the Spinal Cord Injury Fund.
More details can be found in the accompanying scientific article:
[ Ссылка ]



























































![Справедливость: Лекция #1. Моральная сторона убийства [Гарвард]](https://i.ytimg.com/vi/-Qa6jmR_p0o/mqdefault.jpg)












