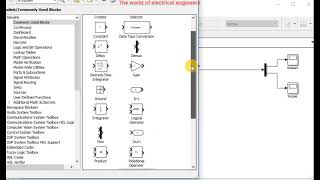
In This Video we have designed LQG Controller (LQR with Integral action) in Matlab Simulink
Download Code [ Ссылка ]
Some More Codes Explained:
state Observer design [ Ссылка ]
Linearization in Matlab [ Ссылка ]
H infinity Controller design in Matlab [ Ссылка ]
LQG Controller design in Matlab Simulink
Теги
LQG Controller design in Matlab Simulinklinear quadraticlinear quadratic regulatorlinear quadratic gaussianLQGLQG controllerkalman filterstate estimationkalman filter with lqrlqrlqg with integral actionoptimal controlleroptimal controller design in matlab simulinklqg in matlablqg in simulinkMatlabmatlab basicsmatlab controlcontrol system matlabmatlab codesoptimization

































































![NASA поймали уникальный сигнал которому 9 миллиардов лет? [Сборник]](https://i.ytimg.com/vi/RA-Tx04mpB8/mqdefault.jpg)




![Как рассчитать и изготовить электромагнит любой мощности. Все об электромагнитах. [Просвещение]](https://i.ytimg.com/vi/9OiFWaFA_8k/mqdefault.jpg)
