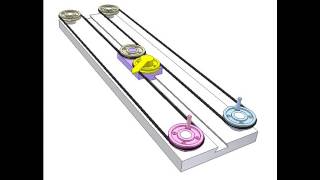
Linear motion of yellow object along longitudinal axis and its rotary motion around vertical axis are controlled by two grounded cranks (in blue and pink). Six pulleys are identical. They are connected together by a closed cable.
Instead of pulleys and cable a chain drive of six sprockets is possible.
When only one crank rotates, the object performs two motions: rotation and translation.
When two cranks rotate in the same direction at the same velocity, the object moves linearly only.
When two cranks rotate in different directions at the same velocity, the object rotates only.
STEP files of this video:
[ Ссылка ]
Inventor files:
[ Ссылка ]