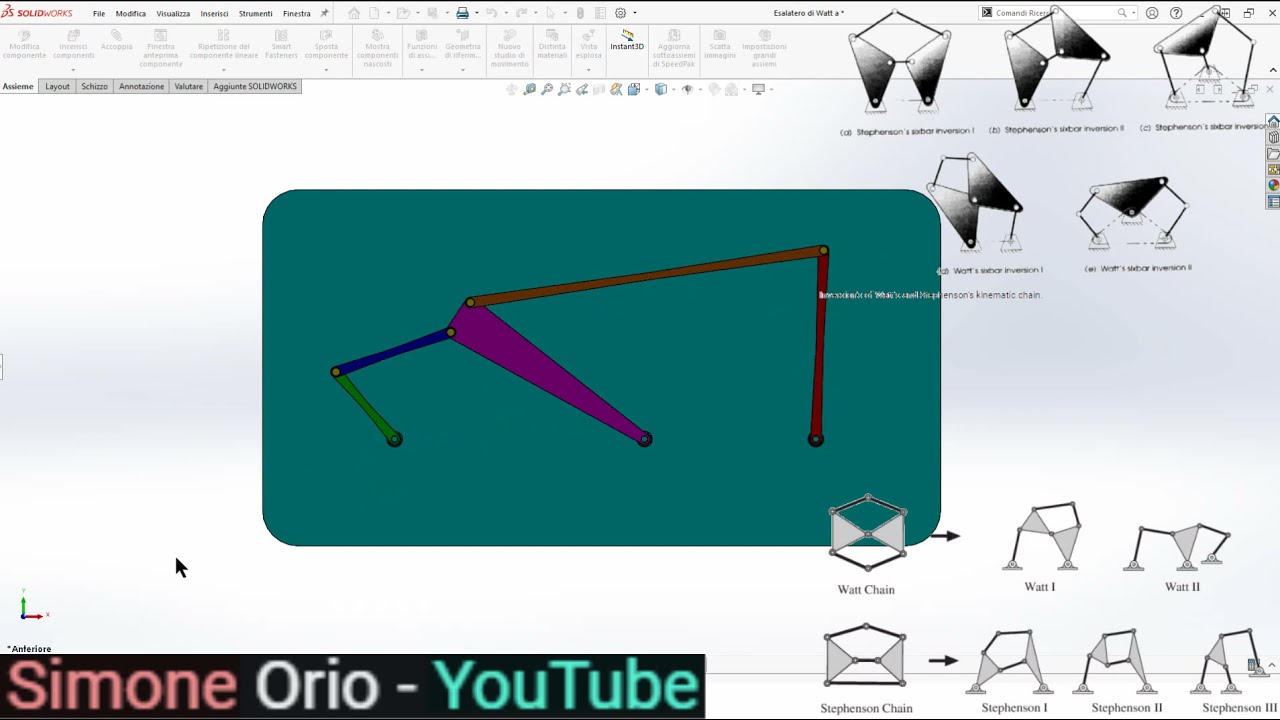
Watt II six-bar linkage
Inversion's of Watt's and Stephenson's kinematic chain
The Watt and Stephenson six-bar chains and their inversions.
During the design geometrical synthesis was used for the first loop in order to attain continuous input rotation and the body-guidance synthesis was used for the second loop for the end effector to follow the desired trajectory in desired orientations.




















































![Главная идея и главная проблема метода Бубновского [S02E05]](https://s2.save4k.ru/pic/MfhiFlJG1s0/mqdefault.jpg)