hello guys,
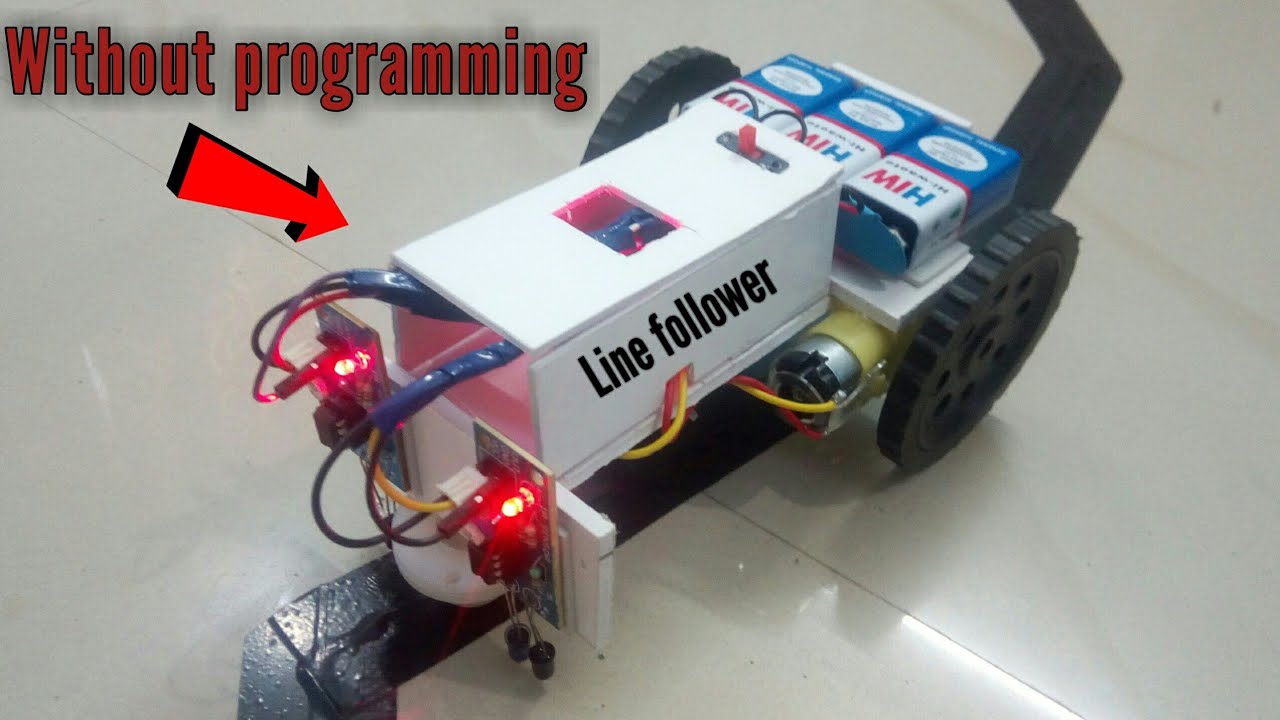
in this video i will show you how to make a line follower robot without microcontroller or without programming with l293d motor driver .
full circuit diagram - [ Ссылка ]
★For best electronics components visit:-
[ Ссылка ]
if you want to make it at home just do step by step and follow my video and never give up.
guys subscribe my channel for exciting videos in the future so that you never miss my exciting upcoming video.
channel link to subscribe-[ Ссылка ]
ABOUT MY CHANNEL
i created this channel to share exciting videos of projects,cars,unboxing,easy diy projects to share with you i hope this projects will be helpful for you to create something new.also your feedback in comment section will help me to create something new for you.
please subscribe my channel to be a part of creative journy.enjoy my videos.
please leave comment and hit on like button and share my videos and don't forget to subscribe.
****************Disclaimer*****************
warning :No one is liable for any loss or damage caused by your reliance on information contained in my videos .you can try it yourself but everything is ON YOUR OWN RISK!!!!!!
credits -
Distrion & Alex Skrindo - Lightning [NCS Release]
[ Ссылка ]
Zaza - Be Together [NCS Release]
[ Ссылка ]
thanks have a nice day.........................................................................
-~-~~-~~~-~~-~-
Please watch: "how to make wifi door lock "
[ Ссылка ]
-~-~~-~~~-~~-~-
how to make a line follower robot without microcontroller
Теги
how to make a line follower robot without microcontrollerhow to make line follower without programmingline follower using l293d motor driverline follower with curcit diagramblack line followerline following botline followerl293d motor driverline follower without programmingline following robot projectrobot without microcontrollerhow to make line following robot at homehow to make a line follower robotlie follower robot without microcontroller
![[Ru/Eng]реакция Неординарный тт Одноклассники реагируют на джона{Gacha react}](https://s2.save4k.ru/pic/e1kg6SJ0f08/mqdefault.jpg)








![Ревность Чонгука [ Анализ из архива на Boosty, Boosty бесплатно по ссылке в комм ]](https://s2.save4k.ru/pic/4amr_1H3bgw/mqdefault.jpg)



![Они меня преследуют! | MEOW - 4 серия [4K]](https://s2.save4k.ru/pic/U_PeNutGOH8/mqdefault.jpg)